My 4 legged robot has 5 moving modes.
(1) On board mode
This mode is to move mounting a harvesting machine and other working machines.
An importance function of this mode is to move with keeping machines in a horizontal position.
(2) Walking mode
This mode is to walk with loading a package(20Kg).
(3) Traction mode
This mode is to tractor other robot and carts.
sample -->
http://robot009.blogspot.jp/2012/10/prototype-robot-movie.html
(4) Climb and down stairs mode
This mode is to climb up stairs and to down stairs with a light load package
(5) ike-ike mode
This mode is to accomplish on the irregular ground.
My 4 legged robot automatically adjust its moving mode to the situation.
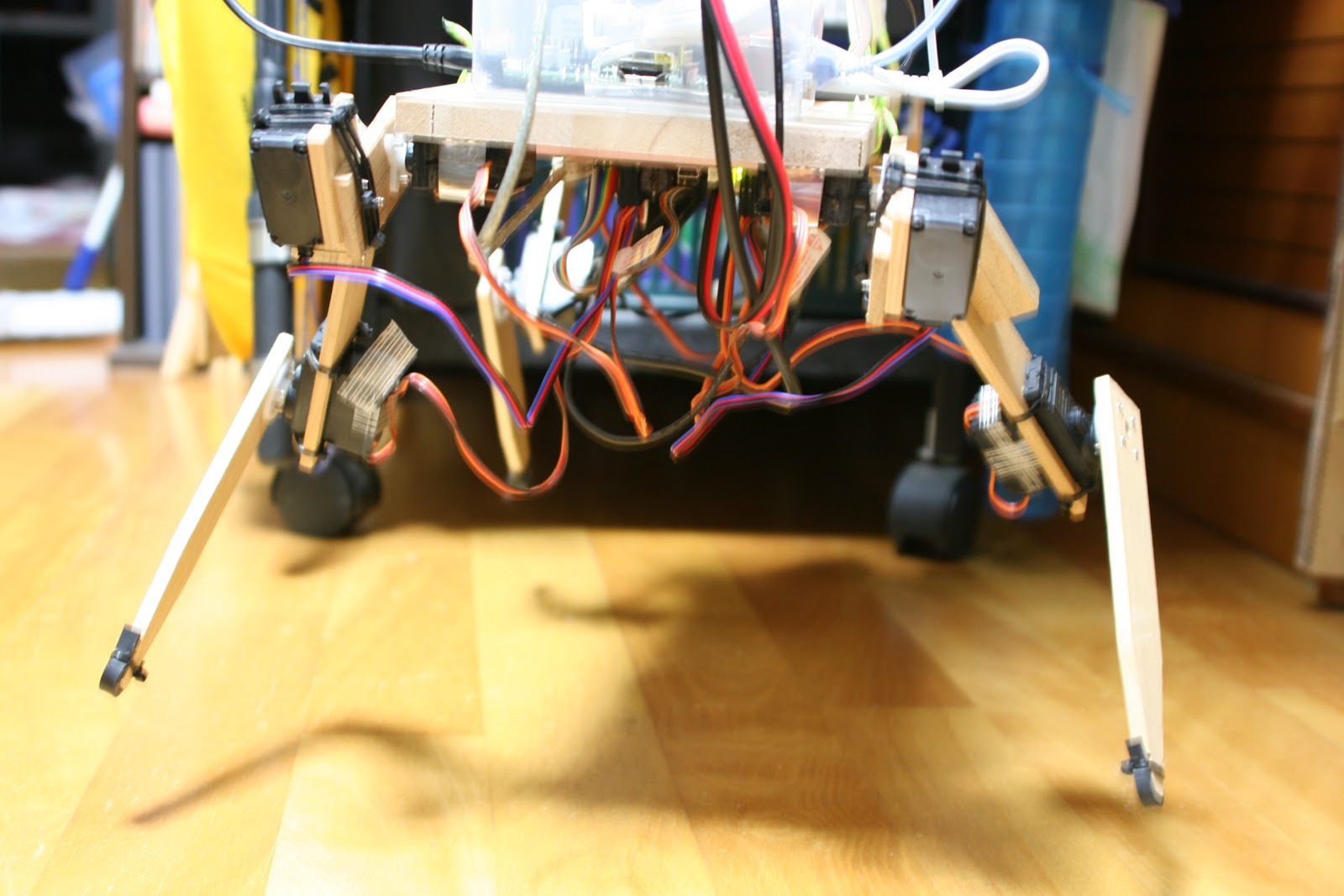
I have built up a prototype robot to validate the above functions.
At the result, I've found many issues, improvements and bugs, so I'm improving away off.
On the other hand, I feel increasingly confident that RDCS is beneficial.
(RDCS is a robot development platform.)
"Requester" is " upper level programs or services of RDCS.
"RDCS Servicer" is common functions of RDCS such as "4D Space Database", Space recognition", "Obstruction Detection" and other functions.
RDCS: Robot Distributed Cooperative System
-->
http://robot009.blogspot.jp/2012/09/update-rdcs.html
私が開発している4脚 歩行 ロボットは5つの移動モードを持っています。
農作業の様々場面で、活動する為にはこれらの複数のモードが必要です。
私のロボットは、分散コンピューティングの考え方を基本にしています。
つまり、計算リソースは、必要に応じて組合わせる事ができます。
下の図は、RDSCのMoving Controlのフローです。
詳しい説明はしませんが、こんな感じです。
開発しながら、Documentを、残さないと大変なことになるので、、、
学者風に説明すれば、かなりの量の論文が書けます。
特に、自己再帰的に、4脚を制御して、路面に合わせて最適な接地位置を選択する
機能なんか、とっても面白い、論文になります。
4脚ロボットは、かなり面白いです。また、応用の範囲が大変広いです。
そのひとつが、Actuatorです。逆に開発しなくてよかったなぁと思います。
しかし、最近は、昼間は本職(農業)で、夕方からロボット開発で、毎晩遅くまでやっています。
でも、すげー楽しいです。
特に、4脚歩行のmotion データの自動作成プログラムや、空間認識プログラムは、錆付いた脳みその、お掃除に最適です。
英語の内容と違った内容になってしまった。まぁ、いいかぁ
By the way, I am a farmer. (*^^)v
This morning, I sprinkled the lactobacillus on the ground of my farm.
I use the lactobacillus to improve the microbial environment of the soil in my farm.
This picture is the shot of pouring the home fermentation lactobacillus out of the bottle to the water pot. To sprinkle the lactobacillus on the farm, I usually dilute by 1%.
この写真は、自家製の乳酸菌を作物や土に散布する為に、じょうろに移している場面です。
今朝の乳酸菌を、畑に撒く準備をしている時に、写しました。
乳酸菌を定期的に土に散布すると、土壌中の微生物環境を良い状態に保てます。
農業を始めてから乳酸菌を使い、いろいろ効能を検証してきましたが、3年間の経験から言うと、
・乳酸菌を薄めるときには、直接水道水を使わない。
塩素が、影響して菌が死にます。
私は、ビタミンCを使って還元した水道水を使います。
・土中の環境改善に効果がある。
土中の環境改善により、病原菌が減り、かつ虫も減ります。
また、土中の菌が増えるので、根の周りの環境がよくなり、
結果的には、美味しい野菜になります。
特に、タマネギには効果絶大です。
・防虫/殺虫効果は、単体利用では期待しないほうが良い。
確かに、乳酸菌は酸なので、PH4程度に薄めた液は、強酸ですから
アブラムシなどに若干の効果がありました。しかし、同時に葉面の菌を殺すことにもなります。
私が、効果のあると認識しているのは、弱酸性にして、アルカリ性のものと、
交互に散布する方法です。水ナスなどでは、虫がつかなくなります。
2年続けて、露地栽培で、化学農薬を使わない水ナスを作ることができました。
最近は、水ナスにつく虫や病原菌に化学農薬が効かないという話を聞きます。農薬で洗い流すように、農薬を丁寧に散布しているそうです。であれば、農薬の本来の意味がありません。
数十年以上化学農薬を使い続けているので、基本的に農薬を使った営農方法に、害虫のライフ
サイクルが、お温暖化の環境と相まって、適応しているのかもしれません。
私も、乳酸菌を薄めた液で、ナスについたアブラムシを洗い流す時もありますが、翌日は、
ほのかにヨーグルトのにおいがします。(営農1年目です。今は、アブラムシがつかないので
そのような使い方はしません)
以下は、私の主観的な考えですが、、、、、
私の方法は、葉面菌と共存できる状態で弱アルカリ性と弱酸性の両方の環境を、
交互に人工的に発生させて
「ここはなんか、おかしい卵をうみたくない」と”遺伝子の深いところにある部分に、生理的に感じさせている”のかもしれません。 基本的に、病原菌や虫は、中性の状態を好みます。
化学農薬に対する記憶は、遺伝子の中にはないですから虫は避けないのではないでしょうか?避けなければ、生き残った虫は、耐性を持ってしまうのは、考えられることです。
また、化学農薬の多くは、中性ではないでしょうか?
農薬で洗い流すような撒布方法をするのであれば、ロボットでは無理だと思います。この方法は、葉を一枚一枚洗う為に、高圧で散布する農薬を被ることになります。
しかし、葉面に霧状の散布をするのであれば、ロボット的な作業工程を組み立てることができます。
アブラ虫を寄り付かせない為には、防虫テープが、大変効果を発揮します。
確か、農業試験場の実験報告もあります。
私は、ナスやトマトハウスの周りにも、張っています。
テープで囲まれた内側に虫を捕捉するテープを張り、1週間程度様子を見ると、
テープで囲んだ箇所と、囲んでないところでは、見た目で効果が比較できます。
地上から0.5m、1m、1.5mの間隔で張れば十分です。
風に吹かれて、ユラユラすると、光が乱反射されて、虫が方向感覚を失うそうです。
化学農薬利用のドグマにはまり込んでいる、農業現場です。
ここには、TPPは関係ありません。
ロボットの話から、、、脱線しました。
Peace!