 |
| front or back |
 |
| side |
 |
| back or front |
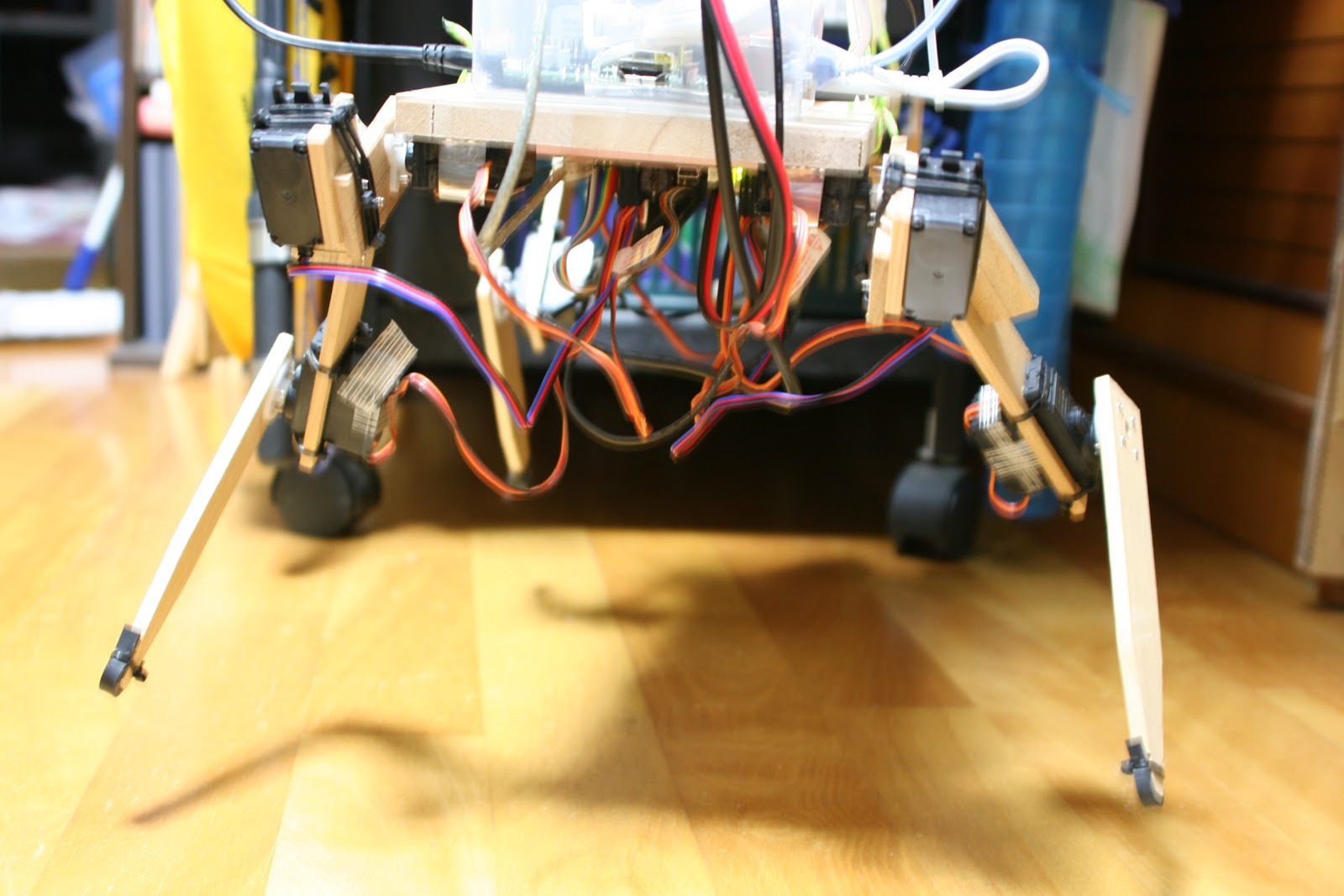
There are 3 joints in back leg joints and 2 joints in front leg.
The reason is to improve turning capability, climbing stairs and moving on rough terrain.
The structural material is wood.
Because wood is easily-worked.
But production model will be built up using aluminum(A5052).
Now considering,,, I think it might be woody robot is good.
If the junctions of structure are reinforced by aluminum parts,
woody material has enough strong material stress, easily-worked,
eco, low cost, easy purchase and warmth to people.
(Nov. 3, 2012)
This prototype uses 10 servos.
But production model will use motors to reduce the robot cost.
Xtion is an important part of my space recognizing system.
I realize a space recognizing system using Xtion, lots of visual processing program and space DB.
And I use an IR Distance Measuring Sensor Unit to detect an obstacle in short range.
As a result, I've developed a technology to make a 4 legged robot that can transport a package ( 20kg). And then the robot production cost is less than $1,000.
Next, I have to develop an actuator for tomato harvesting.
It will ride on the 4 legged robot.
Challenge !!
0 件のコメント:
コメントを投稿